Duration
February 2023 - July 2023
Location
Université de Technologie de Compiègne
Description
During my Intelligent Sensors course at UTC, I worked on an exciting project involving object detection using a Turtlebot robot. The project aimed to identify various objects like colored sheets, mirrors, glass panels, and road signs using multiple sensors. We utilized a camera for color detection and area calculation, an ultrasonic sensor for distance measurement, and a LIDAR for texture analysis and distance comparison.
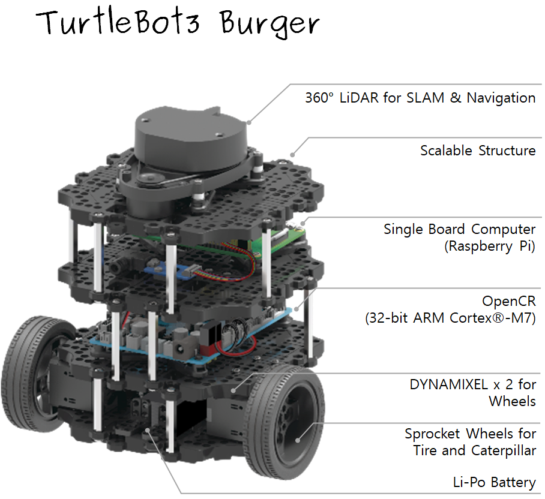
The challenge was to integrate data from these sensors to accurately classify objects. We developed algorithms to process sensor data, including HSV color masking, distance-based size estimation, and intensity-based texture recognition. The project involved creating ROS nodes for each sensor and a central processing node to combine all information. This hands-on experience enhanced my skills in sensor fusion, computer vision, and robotics programming, providing valuable insights into real-world applications of intelligent sensing systems.